250x250
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 |
Tags
- c++로시작하는객체지향프로그래밍
- virtualbox
- 씨쁠쁠내용정리
- 실습문제
- 클론코딩
- turtlesim
- cpp로시작하는객체지향
- 터틀심별
- 터틀심
- 뇌인지
- c++복습
- 터틀심원
- ytmusicclone
- cpp로시작하는객체지향프로그래밍
- c++내용정리
- 객체지향c++
- ROS2
- 우분투
- 인지신경과학
- pandas
- 인지신경과학입문
- 뇌과학
- 터틀봇
- 유튜브뮤직
- 뇌인지과학
- numpy
- 우분투20.04
- 유튜브뮤직클론
- ytmusic
- 인지신경
Archives
- Today
- Total
one님의 블로그
[ROS2] 불완전 원 본문
■ linear.x= 2.0, angular.z= 2.0일 때 ⇒ 90도
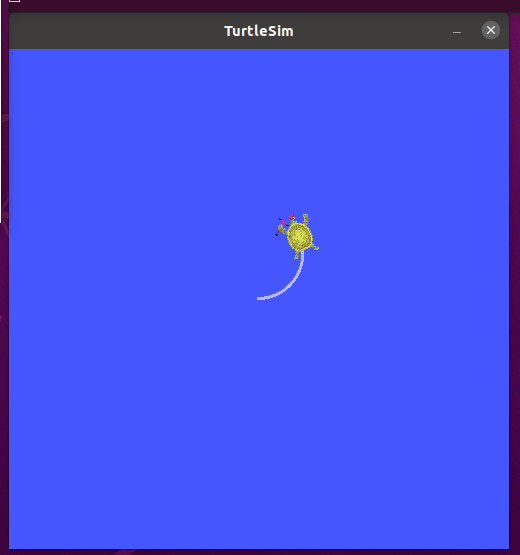
ros2 topic pub --once /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 2.0}}"
■ linear.x= 4.0, angular.z= 4.0일 때 ⇒ 약 230도

ros2 topic pub --once /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 4.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 4.0}}"
■ linear.x= 5.0 , angular.z= 3.13 ⇒ 반원

ros2 topic pub --once /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 3.13}}"
728x90
'학과 공부 > 모빌리티서비스' 카테고리의 다른 글
| [ROS2] ROS 프로그래밍 기초 (Python) (0) | 2024.11.08 |
|---|---|
| [ROS2] ubuntu zip (0) | 2024.10.31 |
| [ROS2] 원 (1바퀴) (0) | 2024.10.30 |
| [ROS2] 예상문제 4 - 반원, 별 ,ㄹ (0) | 2024.10.23 |
| [ROS2] 예상 문제3 - 팔각형, 하트 (0) | 2024.10.22 |
'학과 공부/모빌리티서비스' Related Articles
more


