250x250
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 |
Tags
- ROS2
- numpy
- turtlesim
- ytmusicclone
- 우분투20.04
- 인지신경
- 터틀심
- 터틀봇
- 터틀심별
- 터틀심원
- 클론코딩
- 유튜브뮤직클론
- c++복습
- 뇌인지
- cpp로시작하는객체지향
- ytmusic
- 인지신경과학
- 뇌과학
- 객체지향c++
- c++내용정리
- 우분투
- 씨쁠쁠내용정리
- 뇌인지과학
- 인지신경과학입문
- 유튜브뮤직
- virtualbox
- cpp로시작하는객체지향프로그래밍
- 실습문제
- c++로시작하는객체지향프로그래밍
- pandas
Archives
- Today
- Total
one님의 블로그
[ROS2] Virtual Box 설치 본문
virtual box 2번 날려먹고 다시 깔기 ( 미리 복제해둬야 함)

Erase Ubuntu 20.04.6 Lts and Reinstall 누르고 Install Now

서울 누르고 계속
user name, password 설정하고 필요할때마다 로그인선택 후 continue
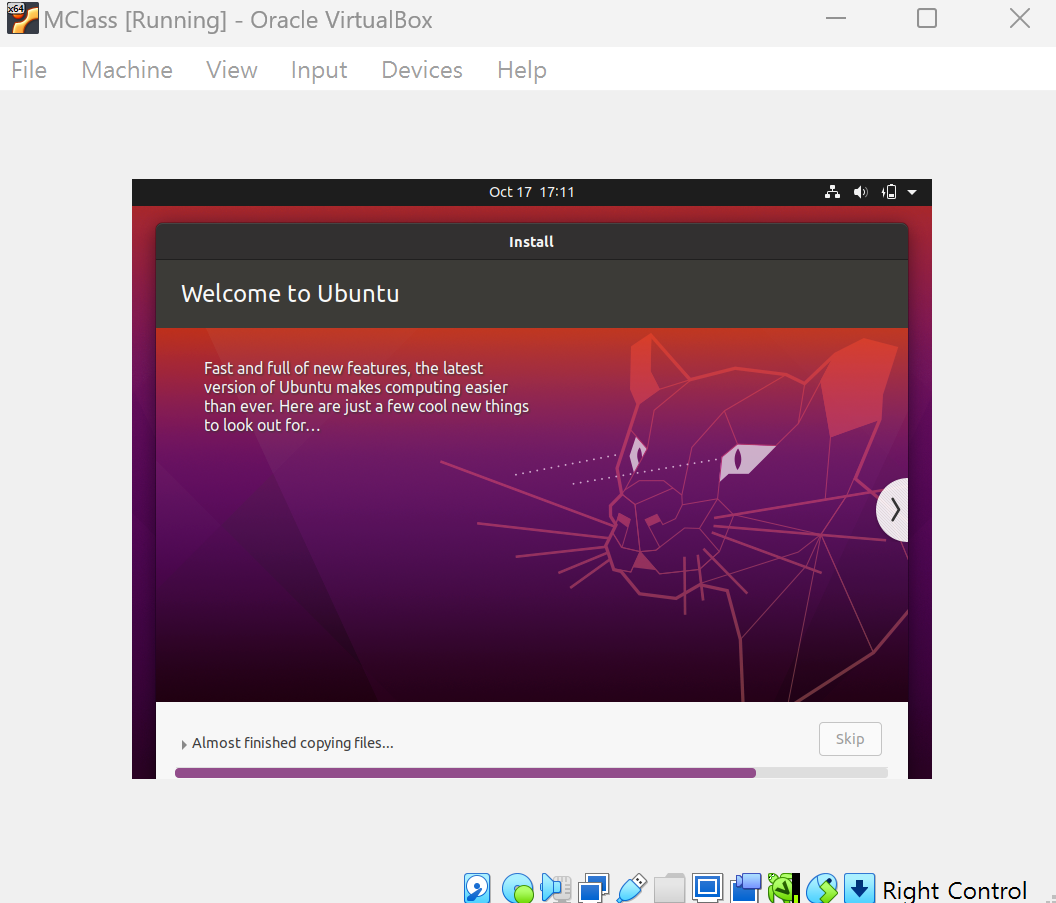
install 중
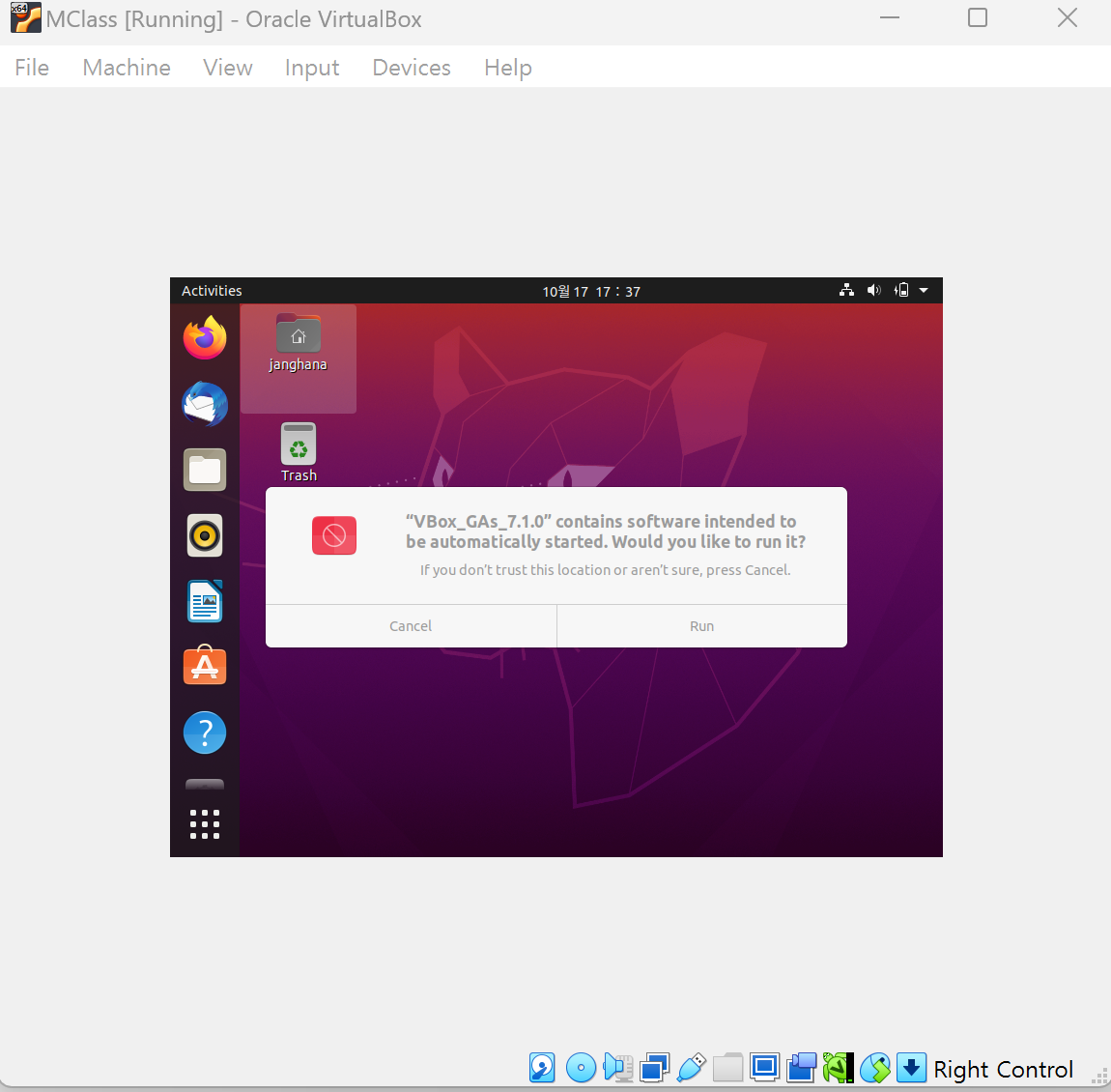
Run
<이 아래로는 1줄 씩 진행>
지역 설정
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8소스설정
sudo apt update && sudo apt install curl gnupg2 lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/nullROS2 패키지 설치
sudo apt update
sudo apt install ros-foxy-desktop ros-foxy-rmw-fastrtps* ros-foxy-rmw-cyclonedds*ROS2 패키지 설치 확인 - ctrl+shift+n 누르고 창 2개 띄워서 확인
//터미널1
source /opt/ros/foxy/setup.bash
ros2 run demo_nodes_cpp talker//터미널2
source /opt/ros/foxy/setup.bash
ros2 run demo_nodes_py listener터미널 1에서 Hello 뜨고 터미널2에서도 숫자 맞춰서 뜨면 성공 → 다 되면 ctrl + C로 종료
ROS 개발 툴 설치
sudo apt update && sudo apt install -y \
build-essential \
cmake \
git \
libbullet-dev \
python3-colcon-common-extensions \
python3-flake8 \
python3-pip \
python3-pytest-cov \
python3-rosdep \
python3-setuptools \
python3-vcstool \
wgetpython3 -m pip install -U \
argcomplete \
flake8-blind-except \
flake8-builtins \
flake8-class-newline \
flake8-comprehensions \
flake8-deprecated \
flake8-docstrings \
flake8-import-order \
flake8-quotes \
pytest-repeat \
pytest-rerunfailures \
pytest
sudo apt install --no-install-recommends -y \
libasio-dev \
libtinyxml2-dev \
libcunit1-dev
ROS2 빌드 테스트
source /opt/ros/foxy/setup.bash
mkdir -p ~/robot_ws/src
cd ~/robot_ws/
colcon build --symlink-install
RUN Commands 설정 (nano로도 가능)
gedit ~/.bashrcgedit으로 연 후에 ↓ 이 내용을 가장 밑에 추가(공백줄 만들고 추가하는게 좋음, 원본 텍스트 건들면 안됨)
source /opt/ros/foxy/setup.bash
source ~/robot_ws/install/local_setup.bash
source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash
source /usr/share/vcstool-completion/vcs.bash
source /usr/share/colcon_cd/function/colcon_cd.sh
export _colcon_cd_root=~/robot_ws
export ROS_DOMAIN_ID=7
export ROS_NAMESPACE=robot1
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
# export RMW_IMPLEMENTATION=rmw_connext_cpp
# export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
# export RMW_IMPLEMENTATION=rmw_gurumdds_cpp
# export RCUTILS_CONSOLE_OUTPUT_FORMAT='[{severity} {time}] [{name}]: {message} ({function_name}() at {file_name}:{line_number})'
export RCUTILS_CONSOLE_OUTPUT_FORMAT='[{severity}]: {message}'
export RCUTILS_COLORIZED_OUTPUT=1
export RCUTILS_LOGGING_USE_STDOUT=0
export RCUTILS_LOGGING_BUFFERED_STREAM=1
alias cw='cd ~/robot_ws'
alias cs='cd ~/robot_ws/src'
alias ccd='colcon_cd'
alias cb='cd ~/robot_ws && colcon build --symlink-install'
alias cbs='colcon build --symlink-install'
alias cbp='colcon build --symlink-install --packages-select'
alias cbu='colcon build --symlink-install --packages-up-to'
alias ct='colcon test'
alias ctp='colcon test --packages-select'
alias ctr='colcon test-result'
alias rt='ros2 topic list'
alias re='ros2 topic echo'
alias rn='ros2 node list'
alias killgazebo='killall -9 gazebo & killall -9 gzserver & killall -9 gzclient'
alias af='ament_flake8'
alias ac='ament_cpplint'
alias testpub='ros2 run demo_nodes_cpp talker'
alias testsub='ros2 run demo_nodes_cpp listener'
alias testpubimg='ros2 run image_tools cam2image'
alias testsubimg='ros2 run image_tools showimage'
728x90
'학과 공부 > ROS2' 카테고리의 다른 글
| [VirtualBox] Ubuntu 한영전환키 설정 (0) | 2024.10.22 |
|---|
'학과 공부/ROS2' Related Articles
more
